With two lab-mates, Fatih Can Kose and Sera Buyukgoz, we have implemented a prototype for a Collaboration Security Watchdog at Kovan Research Laboratory. The ideas behind this work was to set the foundations for an independent, ROS-based hardware node that can run independently on batteries and can be integrated with a ROS application as a ROS node to track the designated security status of a Human-Robot Collaboration task, and interfere in the robot operation whenever necessary.
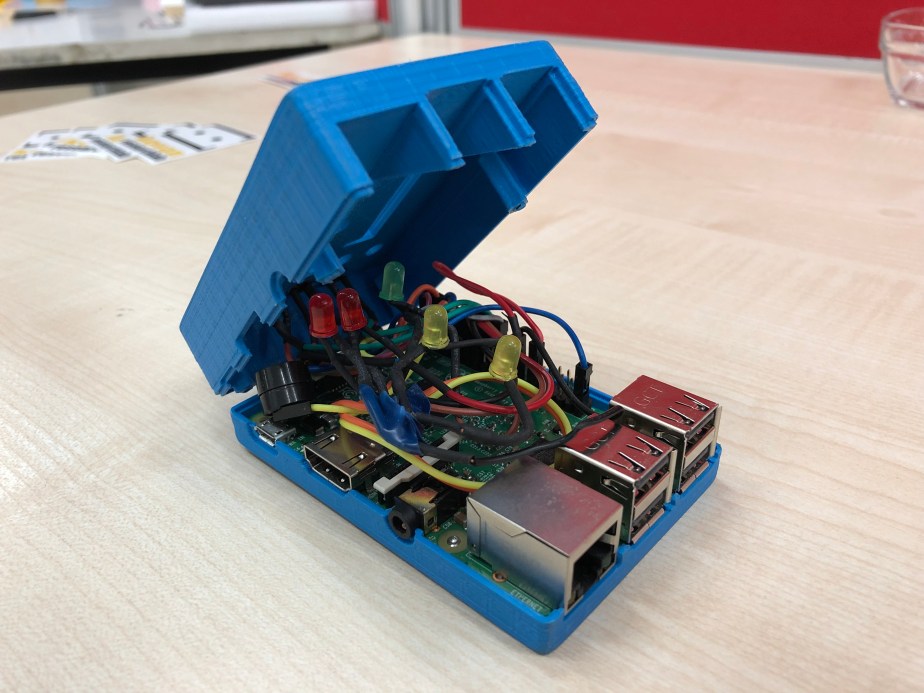
The hardware node is based on a Raspberry Pi and composes of push-buttons to control the functionalities, LEDs to display security status, and a buzzer to sound alerts whenever necessary.
The development with this prototype is still ongoing. You can find a video demonstrating the basic functionality of the Watchdog and some more pictures with comments here.